【成果推介】通用航空飞行监视系统及相关硬件设备
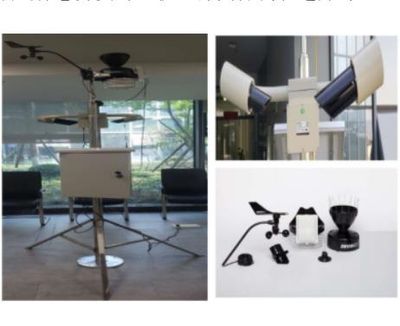
通用航空,是指使用民用航空器从事公共航空运输以外的民用航空活动,包括从事工业、农业、林业、渔业和建筑业的作业飞行以及医疗卫生、抢险救灾、气象探测、海洋监测、科学实验、教育训练、文化体育等方面的飞行活动。近年来,我国通用航空快速发展,行业规模日益扩大,应用领域不断拓展,飞行种类日益增多,飞行需求渐趋旺盛。由于我国通用航空业起步晚,当前通用航空存在通航飞行器监视不到位、飞行服务不完善、综合保障能力较弱等不足。依托北航杭州创新研究院和高校的科研力量与技术平台,立体交通大数据智能分析平台设计实现了通用航空飞行监视系统,汇聚电子航图、航班计划、飞行动态、航空气象、航行情报、基础地理等数据,开展大数据挖掘、辅助分析,以及智能航空信息服务;结合通用航空飞行监视系统的需求,研发了航空监视地面站、微小型ADS-B机载设备、AWOS气象自动观测基站、等通用航空相关硬件设备;面向通用航空有人机/无人机业务的飞行计划航路智能推荐服务和决策辅助支持功能,研发了城市空中交通运行仿真系统,实现了城市低空环境三维可视化,有效保障低空空域运行安全、提高飞行运营效率。